#include <mrm-board.h>
Public Member Functions | |
| Board (Robot *robot, uint8_t maxNumberOfBoards, uint8_t devicesOnABoard, const char *boardName, BoardType boardType, BoardId id) | |
| void | add (char *deviceName, uint16_t canIn, uint16_t canOut) |
| bool | alive (uint8_t deviceNumber=0, bool checkAgainIfDead=false, bool errorIfNotAfterCheckingAgain=false) |
| uint8_t | count () |
| void | aliveSet (bool yesOrNo, uint8_t deviceNumber=0) |
| BoardType | boardType () |
| uint8_t | deadOrAliveCount () |
| uint8_t | devicesOnASingleBoard () |
| uint8_t | devicesMaximumNumberInAllBoards () |
| uint8_t | devicesScan (bool verbose=true, uint16_t mask=0xFFFF) |
| uint8_t | errorCodeLast () |
| uint8_t | errorWasInDeviceNumber () |
| void | firmwareRequest (uint8_t deviceNumber=0xFF) |
| uint16_t | fps (uint8_t deviceNumber=0) |
| void | fpsDisplay () |
| void | fpsRequest (uint8_t deviceNumber=0xFF) |
| BoardId | id () |
| void | idChange (uint16_t newDeviceNumber, uint8_t deviceNumber=0) |
| void | info (uint8_t deviceNumber=0xFF) |
| bool | isForMe (uint32_t canIdOut, uint8_t deviceNumber) |
| bool | isFromMe (uint32_t canIdOut, uint8_t deviceNumber) |
| uint32_t | lastMessageMs (uint8_t deviceNumber=0) |
| virtual bool | messageDecode (uint32_t canId, uint8_t data[8])=0 |
| bool | messagePrint (uint32_t msgId, uint8_t dlc, uint8_t *data, bool outbound) |
| ** Prints a frame More... | |
| void | messageSend (uint8_t *data, uint8_t dlc, uint8_t deviceNumber=0) |
| char * | name (uint8_t deviceNumber) |
| char * | name () |
| void | notificationRequest (uint8_t commandRequestingNotification, uint8_t deviceNumber) |
| void | oscillatorTest (uint8_t deviceNumber=0xFF) |
| void | reset (uint8_t deviceNumber=0xFF) |
| void | start (uint8_t deviceNumber=0xFF, uint8_t measuringModeNow=0, uint16_t refreshMs=0) |
| void | swap (uint8_t deviceNumber1, uint8_t deviceNumber2) |
| void | stop (uint8_t deviceNumber=0xFF) |
| virtual void | test (uint8_t deviceNumber=0xFF, uint16_t betweenTestsMs=0) |
Protected Member Functions | |
| bool | messageDecodeCommon (uint32_t canId, uint8_t data[8], uint8_t deviceNumber=0) |
Protected Attributes | |
| uint32_t | _alive |
| bool | _aliveReport = false |
| char | _boardsName [12] |
| BoardType | _boardType |
| uint8_t | canData [8] |
| uint8_t | devicesOnABoard |
| uint8_t | errorCode = 0 |
| uint8_t | errorInDeviceNumber = 0 |
| std::vector< uint16_t > * | fpsLast |
| BoardId | _id |
| std::vector< uint32_t > * | idIn |
| std::vector< uint32_t > * | idOut |
| std::vector< uint32_t > * | lastMessageReceivedMs |
| std::vector< uint32_t > * | _lastReadingMs |
| uint8_t | maximumNumberOfBoards |
| uint8_t | measuringMode = 0 |
| uint8_t | measuringModeLimit = 0 |
| uint8_t | _message [29] |
| std::vector< char[10]> * | _name |
| int | nextFree |
| Robot * | robotContainer |
Detailed Description
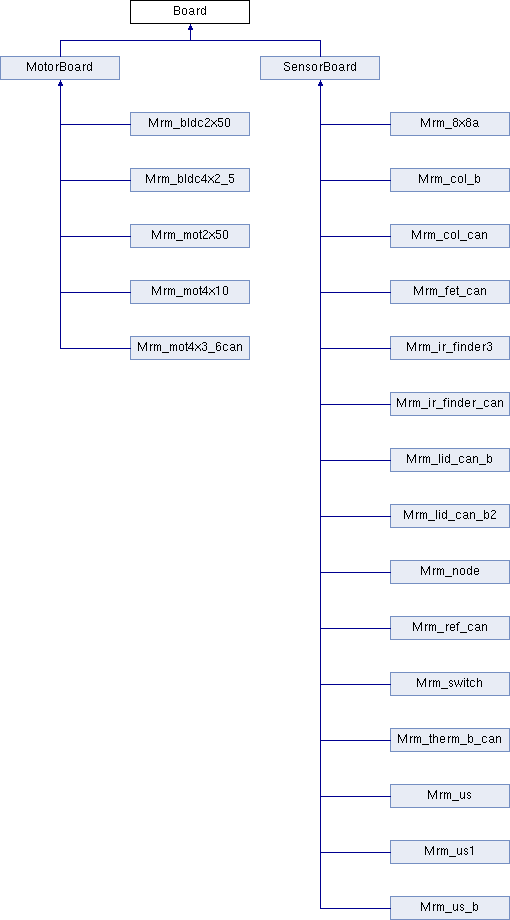
Board is a class of all the boards of the same type, not a single board!
Constructor & Destructor Documentation
◆ Board()
| Board::Board | ( | Robot * | robot, |
| uint8_t | maxNumberOfBoards, | ||
| uint8_t | devicesOnABoard, | ||
| const char * | boardName, | ||
| BoardType | boardType, | ||
| BoardId | id | ||
| ) |
- Parameters
-
robot - robot containing this board maxNumberOfBoards - maximum number of boards devicesOnABoard - number of devices on each board boardName - board's name id - unique id
Board is a single instance for all boards of the same type, not a single board (if there are more than 1 of the same type)!
- Parameters
-
robot - robot containing this board esp32CANBusSingleton - a single instance of CAN Bus common library for all CAN Bus peripherals. maxNumberOfBoards - maximum number of boards devicesOn1Board - number of devices on each board boardName - board's name id - unique id
Member Function Documentation
◆ add()
Add a device.
- Parameters
-
deviceName canIn canOut
◆ alive()
| bool Board::alive | ( | uint8_t | deviceNumber = 0, |
| bool | checkAgainIfDead = false, |
||
| bool | errorIfNotAfterCheckingAgain = false |
||
| ) |
Did it respond to last ping? If not, try another ping and see if it responds.
- Parameters
-
deviceNumber - Devices's ordinal number. Each call of function add() assigns a increasing number to the device, starting with 0. 0xFF - any alive. checkAgainIfDead - try another ping errorIfNotAfterCheckingAgain - the robot will stop. Otherwise only warning displayed.
- Returns
- - alive or not
◆ aliveSet()
| void Board::aliveSet | ( | bool | yesOrNo, |
| uint8_t | deviceNumber = 0 |
||
| ) |
Set aliveness
- Parameters
-
yesOrNo deviceNumber - Devices's ordinal number. Each call of function add() assigns a increasing number to the device, starting with 0.
◆ count()
| uint8_t Board::count | ( | ) |
Did any device respond to last ping?
- Parameters
-
deviceNumber - Devices's ordinal number. Each call of function add() assigns a increasing number to the device, starting with 0.
◆ deadOrAliveCount()
| uint8_t Board::deadOrAliveCount | ( | ) |
Count all the devices, alive or not
- Returns
- - count
◆ devicesMaximumNumberInAllBoards()
|
inline |
Maximum number of devices in all groups (boards) @raturn - number of devices
◆ devicesOnASingleBoard()
|
inline |
Number of devices in each group (board)
- Returns
- - number of devices
◆ devicesScan()
Ping devices and refresh alive array
- Parameters
-
verbose - prints statuses mask - bitwise, 16 bits - no more than 16 devices! Bit == 1 - scan, 0 - no scan.
- Returns
- - alive count
◆ errorCodeLast()
|
inline |
Last error code
- Returns
- - last error code from all devices of this kind
◆ errorWasInDeviceNumber()
|
inline |
Device which caused last error
- Returns
- - device number
◆ firmwareRequest()
| void Board::firmwareRequest | ( | uint8_t | deviceNumber = 0xFF | ) |
Request firmware version
- Parameters
-
deviceNumber - Devices's ordinal number. Each call of function add() assigns a increasing number to the device, starting with 0. 0xFF - for all devices.
Request firmware version
- Parameters
-
deviceNumber - Devices's ordinal number. Each call of function add() assigns a increasing number to the device, starting with 0.
◆ fps()
Frames Per Second
- Parameters
-
deviceNumber - Devices's ordinal number. Each call of function add() assigns a increasing number to the device, starting with 0.
- Returns
- - FPS
Frames Per Second
- Parameters
-
deviceNumber - Devices's ordinal number. Each call of function add() assigns a increasing number to the device, starting with 0. 0xFF - for all devices.
- Returns
- - FPS
◆ fpsDisplay()
| void Board::fpsDisplay | ( | ) |
Display FPS for all devices
◆ fpsRequest()
| void Board::fpsRequest | ( | uint8_t | deviceNumber = 0xFF | ) |
Request Frames Per Second
- Parameters
-
deviceNumber - Devices's ordinal number. Each call of function add() assigns a increasing number to the device, starting with 0. 0xFF - for all devices.
◆ id()
|
inline |
Board class id, not each device's
◆ idChange()
Change CAN Bus id
- Parameters
-
newDeviceNumber - new number deviceNumber - Devices's ordinal number. Each call of function add() assigns a increasing number to the device, starting with 0.
Change CAN Bus id
- Parameters
-
newId - CAN Bus id deviceNumber - Devices's ordinal number. Each call of function add() assigns a increasing number to the device, starting with 0.
◆ info()
| void Board::info | ( | uint8_t | deviceNumber = 0xFF | ) |
Request information
- Parameters
-
deviceNumber - Devices's ordinal number. Each call of function add() assigns a increasing number to the device, starting with 0. 0xFF - for all devices.
◆ isForMe()
Is the frame addressed to this device's Arduino object?
- Parameters
-
canIdOut - CAN Bus id. deviceNumber - Devices's ordinal number. Each call of function add() assigns a increasing number to the device, starting with 0.
- Returns
- - if true, it is
Is the frame addressed to this device's Arduino object?
- Parameters
-
canIdOut - CAN Bus id. deviceNumber - Devices's ordinal number. Each call of function add() assigns a increasing number to the deviceNumber, starting with 0.
- Returns
- - if true, it is
◆ isFromMe()
Does the frame originate from this device's Arduino object?
- Parameters
-
canIdOut - CAN Bus id. deviceNumber - Devices's ordinal number. Each call of function add() assigns a increasing number to the deviceNumber, starting with 0.
- Returns
- - if true, it does
◆ lastMessageMs()
Last message received
- Parameters
-
deviceNumber - Devices's ordinal number. Each call of function add() assigns a increasing number to the device, starting with 0.
- Returns
- - milliseconds
◆ messageDecode()
Read CAN Bus message into local variables
- Parameters
-
canId - CAN Bus id data - 8 bytes from CAN Bus message.
- Returns
- - true if canId for this class
Implemented in Mrm_us1, Mrm_us, Mrm_us_b, Mrm_therm_b_can, Mrm_ref_can, Mrm_node, Mrm_lid_can_b2, Mrm_lid_can_b, Mrm_ir_finder3, Mrm_ir_finder_can, Mrm_fet_can, Mrm_col_can, Mrm_col_b, SensorBoard, MotorBoard, and Mrm_8x8a.
◆ messageDecodeCommon()
|
protected |
Common part of message decoding
- Parameters
-
canId - CAN Bus id data - 8 bytes from CAN Bus message. deviceNumber - Devices's ordinal number. Each call of function add() assigns a increasing number to the device, starting with 0.
- Returns
- - command found
◆ messagePrint()
** Prints a frame
Prints a frame
- Parameters
-
msgId - messageId dlc - data length data - payload outbound - otherwise inbound
- Returns
- -if true, foundand printed
Prints a frame
- Parameters
-
msgId - messageId dlc - data length data - payload outbound - otherwise inbound
- Returns
- - if true, found and printed
◆ messageSend()
Send CAN Bus message
- Parameters
-
dlc - data length data - payload deviceNumber - Devices's ordinal number. Each call of function add() assigns a increasing number to the device, starting with 0.
◆ name() [1/2]
|
inline |
Returns device group's name
- Returns
- - name
◆ name() [2/2]
| char * Board::name | ( | uint8_t | deviceNumber | ) |
Returns device's name
- Parameters
-
deviceNumber - Motor's ordinal number. Each call of function add() assigns a increasing number to the device, starting with 0.
- Returns
- - name
Returns device's name
- Parameters
-
deviceNumber - Device's ordinal number. Each call of function add() assigns a increasing number to the device, starting with 0.
- Returns
- - name
◆ notificationRequest()
Request notification
- Parameters
-
commandRequestingNotification deviceNumber - Devices's ordinal number. Each call of function add() assigns a increasing number to the device, starting with 0.
◆ oscillatorTest()
| void Board::oscillatorTest | ( | uint8_t | deviceNumber = 0xFF | ) |
Reserved for production
- Parameters
-
deviceNumber - Devices's ordinal number. Each call of function add() assigns a increasing number to the device, starting with 0.
◆ reset()
| void Board::reset | ( | uint8_t | deviceNumber = 0xFF | ) |
Reset
- Parameters
-
deviceNumber - Device's ordinal number. Each call of function add() assigns a increasing number to the device, starting with 0. 0xFF - all devices.
◆ start()
| void Board::start | ( | uint8_t | deviceNumber = 0xFF, |
| uint8_t | measuringModeNow = 0, |
||
| uint16_t | refreshMs = 0 |
||
| ) |
Starts periodical CANBus messages that will be refreshing values that can be read by reading()
- Parameters
-
deviceNumber - Device's ordinal number. Each call of function add() assigns a increasing number to the device, starting with 0. 0xFF - all devices. measuringModeNow - Measuring mode id. Default 0. refreshMs - gap between 2 CAN Bus messages to refresh local Arduino copy of device's data. 0 - device's default.
◆ stop()
| void Board::stop | ( | uint8_t | deviceNumber = 0xFF | ) |
Stops periodical CANBus messages that refresh values that can be read by reading()
- Parameters
-
deviceNumber - Device's ordinal number. Each call of function add() assigns a increasing number to the device, starting with 0.
◆ swap()
add() assigns device numbers one after another. swap() changes the sequence later. Therefore, add(); add(); will assign number 0 to a device with the smallest CAN Bus id and 1 to the one with the next smallest. If we want to change the order so that now the device 1 is the one with the smalles CAN Bus id, we will call swap(0, 1); after the the add() commands.
- Parameters
-
deviceNumber1 - Device's ordinal number. Each call of function add() assigns a increasing number to the device, starting with 0. deviceNumber2 - Second device.
◆ test()
Test
- Parameters
-
deviceNumber - Device's ordinal number. Each call of function add() assigns a increasing number to the device, starting with 0. 0xFF - all devices. betweenTestsMs - time in ms between 2 tests. 0 - default.
Reimplemented in Mrm_lid_can_b, and MotorBoard.
The documentation for this class was generated from the following files:
- C:/Users/priba/Documents/PlatformIO/Projects/MRMS/lib/mrm-board/src/mrm-board.h
- C:/Users/priba/Documents/PlatformIO/Projects/MRMS/lib/mrm-board/src/mrm-board.cpp